What is Algorithm Engineering?
Algorithm Engineering — L01
Who are we?

Dr. Phillip Keldenich
- Over a decade of experience in algorithm engineering research.
- Heinrich-Büssing-Preis winner
- Academic, deep view.
- His son knows more about excavators than you ever will.

Dr. Dominik Krupke
- Over a decade of experience in algorithm engineering research.
- Over two years of experience in consulting.
- Author of The CP-SAT Primer.
- Applied, broad view.
How fast can you multiply two matrices?
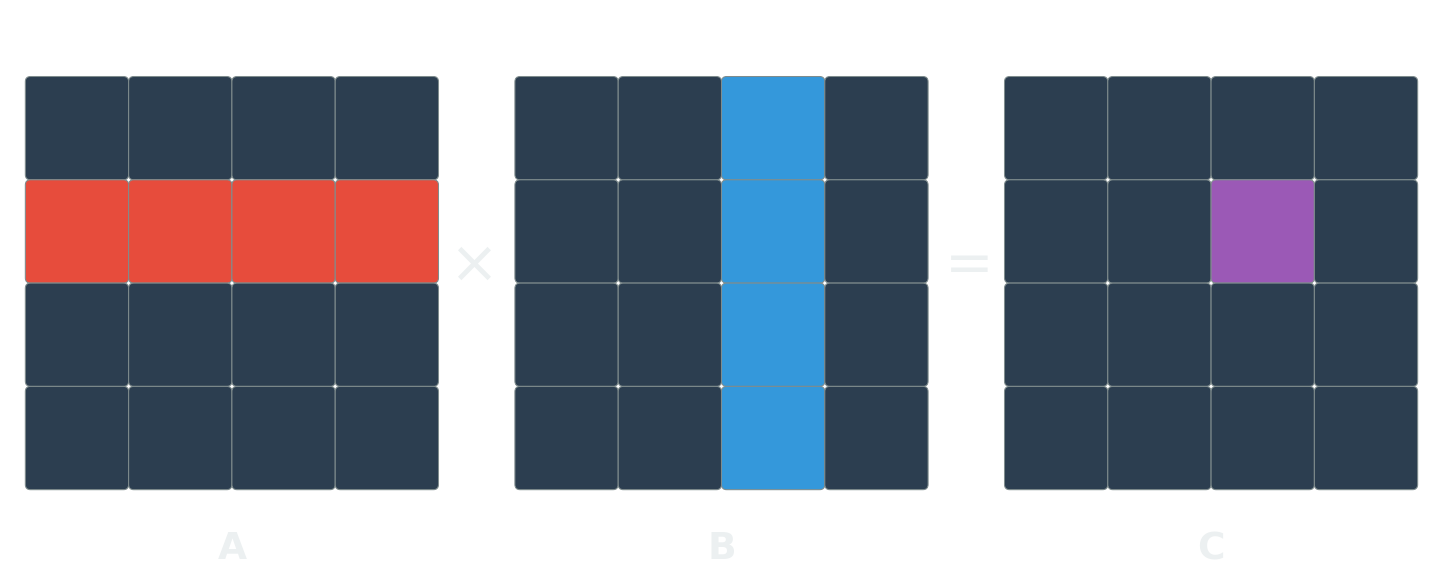
This takes 7 hours. How much room for optimization is there?
60,000×. Down to 0.41 seconds. Same machine. Same result.
Brute force is not an option
Try all \(2^n\) subsets, keep the best feasible one.
50 items: \(2^{50} \approx 10^{15}\) subsets
At \(10^9\)/second → 13 days
100 items: \(2^{100} \approx 10^{30}\) subsets
At \(10^{18}\)/second → 31,000 years

NP-hard ≠ unsolvable
Real-world problems have structure — most of the search space is junk.
Smart algorithms exploit this: prune infeasible branches, bound what’s achievable, propagate constraints.




Result: well-structured problems with millions of variables solved routinely — despite exponential worst case.
Standing on the shoulders of giants
Decades of research on branch & bound, constraint propagation, and LP relaxation are packaged into battle-tested generic solvers.
You don’t need to reimplement any of it — just like a database engineer never reimplements PostgreSQL.
Declarative modelling languages let you describe what you want. The solver figures out how to search.
The Traveling Salesman Problem
The knapsack is actually quite tame. TSP is not — you don’t get it right by accident.
- Easy to state: visit every city exactly once, minimize total distance
- One of the great reference problems in optimization
- Many techniques were first developed for TSP and then generalized
State-of-the-art solvers can handle instances with tens of thousands of cities — provably optimal. Heuristics can tackle millions.

The magic ingredient: LP relaxation
NP-hard

Polynomial
Branch & Bound — visualized
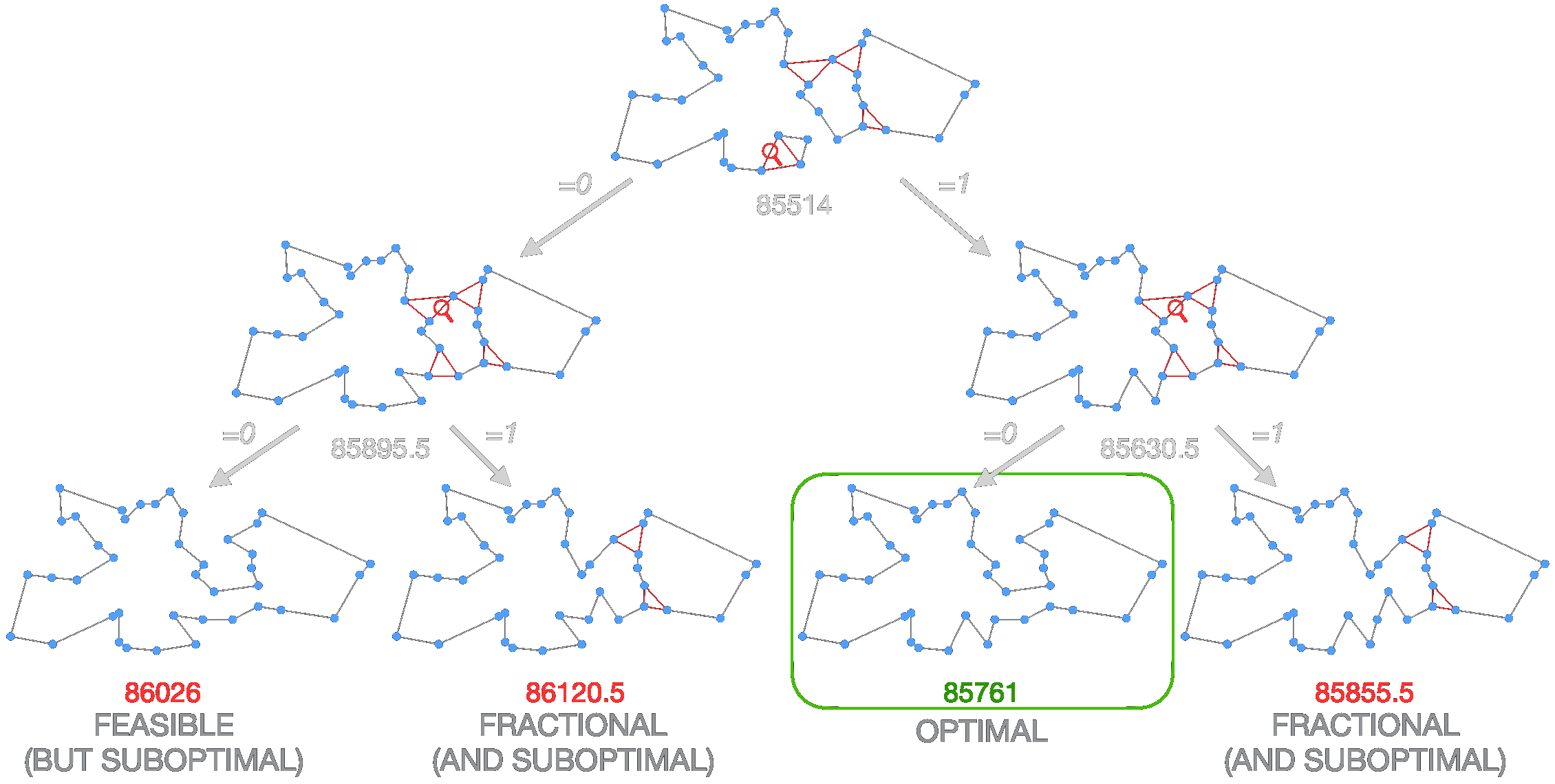
relax → bound → branch → prune
CP-SAT: The full declarative framework
Integer & interval variables, rich constraints (all different, no overlap, cumulative), and optimization — one solver.
Example: 2D bin packing
height = model.new_int_var(0, H_max, "height")
for w, h in boxes:
x = model.new_int_var(0, W - w, f"x_{i}")
y = model.new_int_var(0, H_max - h, f"y_{i}")
x_ivls += [model.new_fixed_size_interval_var(x, w)]
y_ivls += [model.new_fixed_size_interval_var(y, h)]
model.add(y + h <= height)
model.add_no_overlap_2d(x_ivls, y_ivls)
model.minimize(height)
CP-SAT combines ideas from SAT, MIP, and Constraint Programming into one solver.
Decomposition
Some problems mix different structures that no single solver handles well. Split them.
Example: Delivery with 3D packing constraints.
- Master: Route planning → MIP
- Subproblem: Do packages fit? → CP
- Feedback loop if packing fails
Use the right tool for each piece — easier to solve separately than together.

Metaheuristics
Your model is an abstraction — good enough is good enough.
Some of the most effective metaheuristics use exact solvers as building blocks.
Large Neighborhood Search:
- Pick a region of the solution
- Destroy it (remove 20% of stops)
- Repair it optimally (MIP, CP, …)
- Repeat
Your perfect solution meets reality
You optimized the delivery route. Minimal cost, minimal time. Beautiful.
One traffic jam and the whole plan falls apart.
If your solution is brittle and you can’t recover quickly, it’s not a production system.
Benchmarking is harder than you think
Which solver is best for this nurse scheduling problem?
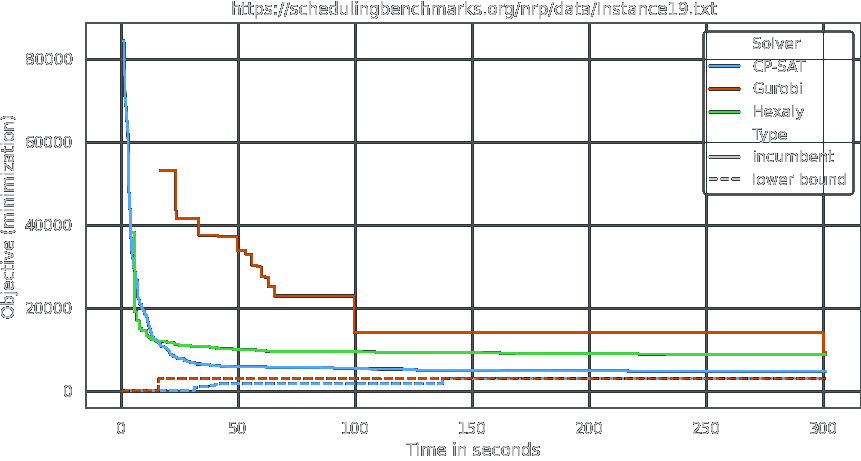
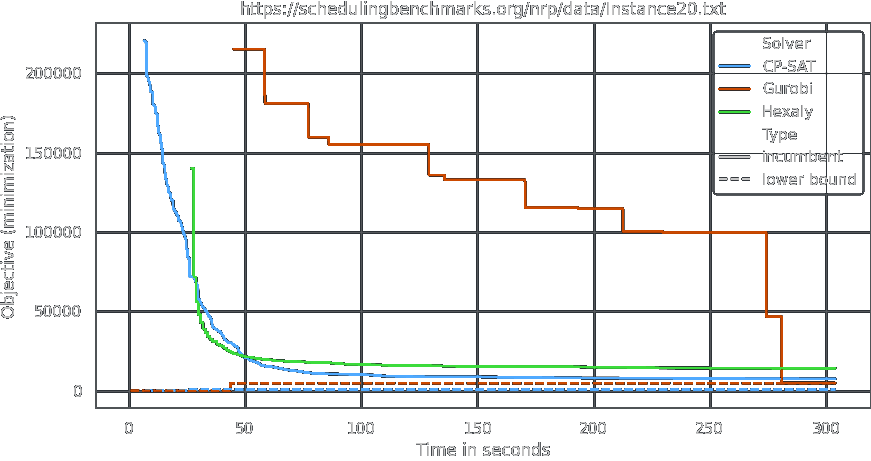
It depends on when you stop the clock — and which instance you look at. There is no single “fastest” solver.
Your optimization code has special needs
- A wrong constraint doesn’t crash — the solver quietly returns a worse solution, and you never notice
- Requirements change constantly — without clean structure, you rewrite from scratch
We’ll teach patterns to write optimization code that is readable, testable, and maintainable.
The INFORMS Analytics Framework
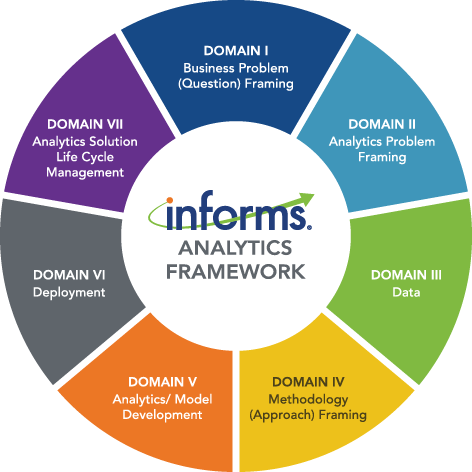
The algorithm lives in Domain V — but it only works if the other six domains are right too.
Recommended reading